转载自:http://cmsblogs.com/?p=2205
在线程获取同步状态时如果获取失败,则加入CLH同步队列,通过通过自旋的方式不断获取同步状态,但是在自旋的过程中则需要判断当前线程是否需要阻塞,其主要方法在acquireQueued():
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
通过这段代码我们可以看到,在获取同步状态失败后,线程并不是立马进行阻塞,需要检查该线程的状态,检查状态的方法为 shouldParkAfterFailedAcquire(Node pred, Node node) 方法,该方法主要靠前驱节点判断当前线程是否应该被阻塞,代码如下:
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
//前驱节点
int ws = pred.waitStatus;
//状态为signal,表示当前线程处于等待状态,直接放回true
if (ws == Node.SIGNAL)
return true;
//前驱节点状态 > 0 ,则为Cancelled,表明该节点已经超时或者被中断了,需要从同步队列中取消
if (ws > 0) {
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
}
//前驱节点状态为Condition、propagate
else {
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
这段代码主要检查当前线程是否需要被阻塞,具体规则如下:
- 如果当前线程的前驱节点状态为SINNAL,则表明当前线程需要被阻塞,调用unpark()方法唤醒,直接返回true,当前线程阻塞。
- 如果当前线程的前驱节点状态为CANCELLED(ws > 0),则表明该线程的前驱节点已经等待超时或者被中断了,则需要从CLH队列中将该前驱节点删除掉,直到回溯到前驱节点状态 <= 0 ,返回false
- 如果前驱节点非SINNAL,非CANCELLED,则通过CAS的方式将其前驱节点设置为SINNAL,返回false
如果 shouldParkAfterFailedAcquire(Node pred, Node node) 方法返回true,则调用parkAndCheckInterrupt()方法阻塞当前线程:
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
parkAndCheckInterrupt() 方法主要是把当前线程挂起,从而阻塞住线程的调用栈,同时返回当前线程的中断状态。其内部则是调用LockSupport工具类的park()方法来阻塞该方法。 当线程释放同步状态后,则需要唤醒该线程的后继节点:
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
//唤醒后继节点
unparkSuccessor(h);
return true;
}
return false;
}
调用unparkSuccessor(Node node)唤醒后继节点:
private void unparkSuccessor(Node node) {
//当前节点状态
int ws = node.waitStatus;
//当前状态 < 0 则设置为 0
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
//当前节点的后继节点
Node s = node.next;
//后继节点为null或者其状态 > 0 (超时或者被中断了)
if (s == null || s.waitStatus > 0) {
s = null;
//从tail节点来找可用节点
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
//唤醒后继节点
if (s != null)
LockSupport.unpark(s.thread);
}
可能会存在当前线程的后继节点为null,超时、被中断的情况,如果遇到这种情况了,则需要跳过该节点,但是为何是从tail尾节点开始,而不是从node.next开始呢?原因在于node.next仍然可能会存在null或者取消了,所以采用tail回溯办法找第一个可用的线程。最后调用LockSupport的unpark(Thread thread)方法唤醒该线程。
LockSupport
从上面我可以看到,当需要阻塞或者唤醒一个线程的时候,AQS都是使用LockSupport这个工具类来完成的。
LockSupport是用来创建锁和其他同步类的基本线程阻塞原语
每个使用LockSupport的线程都会与一个许可关联,如果该许可可用,并且可在进程中使用,则调用park()将会立即返回,否则可能阻塞。如果许可尚不可用,则可以调用 unpark 使其可用。但是注意许可不可重入,也就是说只能调用一次park()方法,否则会一直阻塞。
LockSupport定义了一系列以park开头的方法来阻塞当前线程,unpark(Thread thread)方法来唤醒一个被阻塞的线程。如下:
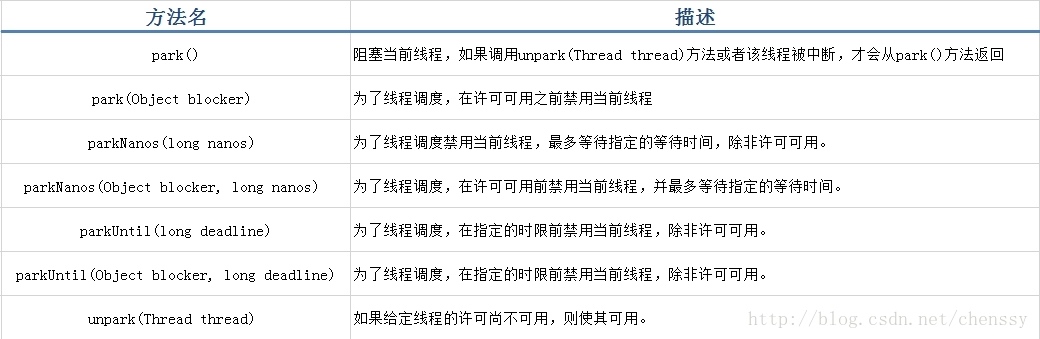
park(Object blocker)方法的blocker参数,主要是用来标识当前线程在等待的对象,该对象主要用于问题排查和系统监控。 park方法和unpark(Thread thread)都是成对出现的,同时unpark必须要在park执行之后执行。
当然并不是说没有不调用unpark线程就会一直阻塞,park有一个方法,它带了时间戳(parkNanos(long nanos):为了线程调度禁用当前线程,最多等待指定的等待时间,除非许可可用)。 park()方法的源码如下:
public static void park() {
UNSAFE.park(false, 0L);
}
unpark(Thread thread)方法源码如下:
public static void unpark(Thread thread) {
if (thread != null)
UNSAFE.unpark(thread);
}
从上面可以看出,其内部的实现都是通过UNSAFE(sun.misc.Unsafe UNSAFE)来实现的,其定义如下:
public native void park(boolean var1, long var2);
public native void unpark(Object var1);
两个都是native本地方法。Unsafe 是一个比较危险的类,主要是用于执行低级别、不安全的方法集合。尽管这个类和所有的方法都是公开的(public),但是这个类的使用仍然受限,你无法在自己的java程序中直接使用该类,因为只有授信的代码才能获得该类的实例。